With a dynamical model we can simulate forwards in time and see how a
system might change over time, given a set of parameters. If we have a
time series data set though, we can go a step further and find
parameters consistent with the data. This vignette gives an introduction
to the approaches to fitting to data available for odin2
models. This support largely derives from the monty and dust2 packages
and we will refer the reader to their documentation where further detail
is on offer.
Setting the scene
We’ll start with a simple data set of daily cases of some disease over time
data <- read.csv("incidence.csv")
head(data)
#> cases time
#> 1 3 1
#> 2 2 2
#> 3 2 3
#> 4 2 4
#> 5 1 5
#> 6 3 6
plot(cases ~ time, data, pch = 19, las = 1,
xlab = "Time (days)", ylab = "Cases")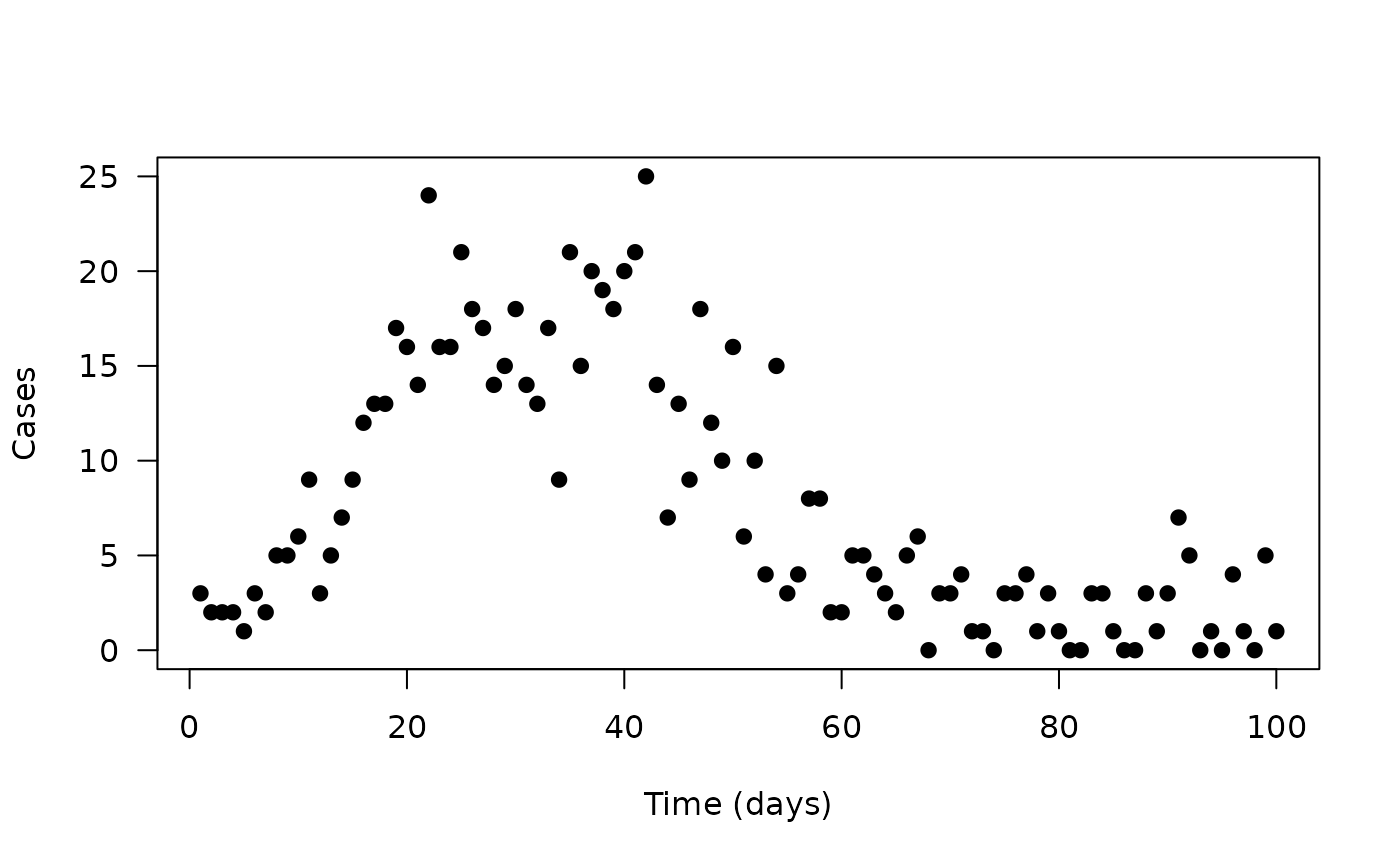
The data here shows a classic epidemic, with cases rising up to some
peak and falling. We will try fitting this with a simple compartmental
SIR (Susceptible-Infected-Recovered) model, which we will write here in
odin2. There are a number of possible ways of writing this, but here
we’ll go for a stochastic discrete-time version, mostly because it will
allow us to demonstrate a number of features of odin2,
dust2 and monty (and because the ODE version
is not yet written).
Before fitting the data, we’ll write out a model that captures the
core ideas (this is replicated from vignette("odin2")), but
with an equation for incidence added (the number of new
infections over one time unit).
sir <- odin({
initial(S) <- N - I0
initial(I) <- I0
initial(R) <- 0
initial(incidence, zero_every = 1) <- 0
update(S) <- S - n_SI
update(I) <- I + n_SI - n_IR
update(R) <- R + n_IR
update(incidence) <- incidence + n_SI
n_SI <- Binomial(S, p_SI)
n_IR <- Binomial(I, p_IR)
p_SI <- 1 - exp(-beta * I / N * dt)
p_IR <- 1 - exp(-gamma * dt)
beta <- parameter()
gamma <- parameter()
I0 <- parameter()
N <- 1000
}, quiet = TRUE)We can initialise this system and simulate it out over this time series and plot the results against the data:
pars <- list(beta = 0.3, gamma = 0.1, I0 = 5)
sys <- dust_system_create(sir(), pars, n_particles = 20, dt = 0.25)
dust_system_set_state_initial(sys)
time <- 0:100
y <- dust_system_simulate(sys, time)The dust_system_simulate() function returns an
n_state by n_particle by n_time
matrix (here, 4 x 20 x 101). We’re interested in incidence, and
extracting that gives us a 20 x 101 matrix, which we’ll transpose in
order to plot it:
incidence <- dust_unpack_state(sys, y)$incidence
matplot(time, t(incidence), type = "l", lty = 1, col = "#00000055",
xlab = "Time (days)", ylab = "Cases", las = 1)
points(cases ~ time, data, pch = 19, col = "red")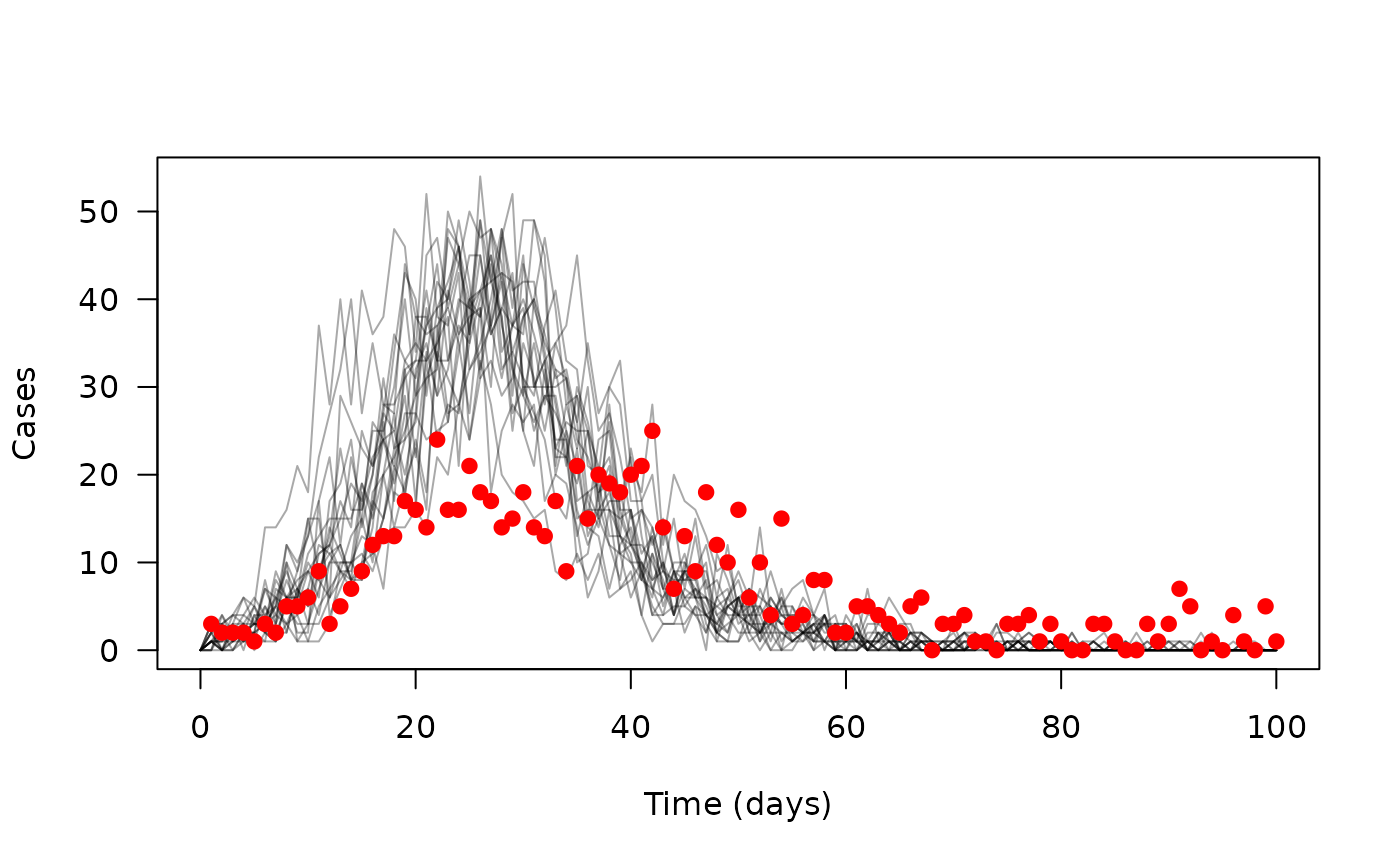
The modelled trajectories are in grey, with the data points overlaid in red – we’re not doing a great job here of capturing the data.
Comparing to data
We’re interested in fitting this model to data, and the first thing we need is a measure of goodness of fit, which we can also code into the odin model, but first we’ll explain the idea.
Our system moves forward in time until it finds a new data point; at this point in time we will have one or several particles present. We then ask for each particle how likely this data point is. This means that these calculations are per-particle and per-data-point.
Here, we’ll use a Poisson to ask “what is the probability of observing this many cases with a mean equal to our modelled number of daily cases”.
The syntax for this looks a bit different to the odin code above:
sir <- odin({
initial(S) <- N - I0
initial(I) <- I0
initial(R) <- 0
initial(incidence, zero_every = 1) <- 0
update(S) <- S - n_SI
update(I) <- I + n_SI - n_IR
update(R) <- R + n_IR
update(incidence) <- incidence + n_SI
n_SI <- Binomial(S, p_SI)
n_IR <- Binomial(I, p_IR)
p_SI <- 1 - exp(-beta * I / N * dt)
p_IR <- 1 - exp(-gamma * dt)
beta <- parameter()
gamma <- parameter()
I0 <- parameter()
N <- 1000
# Comparison to data
cases <- data()
cases ~ Poisson(incidence)
}, quiet = TRUE)These last two lines are the new addition to the odin code. The first
says that cases will be found in the data. The second
restates our aim from the previous paragraph, comparing the observed
cases against modelled incidence. The syntax
here is designed to echo that of the monty
DSL.
With this version of the model we can compute likelihoods with
dust2’s machinery.
Stochastic likelihood with a particle filter
Our system is stochastic; each particle will produce a different trajectory and from that a different likelihood. Each time we run the system we get a different combination of likelihoods. We can use a particle filter to generate an estimate of the marginal likelihood, averaging over this stochasticity. This works by resampling the particles at each point along the time series, according to how likely they are.
filter <- dust_filter_create(sir(), 0, data, n_particles = 200)Each time we run this filter the likelihood will be slightly (or very) different:
dust_likelihood_run(filter, pars)
#> [1] -282.4783
dust_likelihood_run(filter, pars)
#> [1] -273.9318If you run the filter enough times a distribution will emerge of
course. Let’s compare two points in parameter space, varying the
beta parameter and running the filter 100 times each:
pars1 <- modifyList(pars, list(beta = 0.25))
pars2 <- modifyList(pars, list(beta = 0.23))
ll1 <- replicate(100, dust_likelihood_run(filter, pars1))
ll2 <- replicate(100, dust_likelihood_run(filter, pars2))
xb <- seq(floor(min(ll1, ll2)), ceiling(max(ll1, ll2)), by = 1)
hist(ll2, breaks = xb, col = "#0000ff99", freq = FALSE,
xlab = "Log likelihood", ylab = "Density", main = "")
hist(ll1, breaks = xb, add = TRUE, freq = FALSE, col = "#ff000099")
abline(v = c(mean(ll1), mean(ll2)), col = c("red", "blue"), lwd = 2)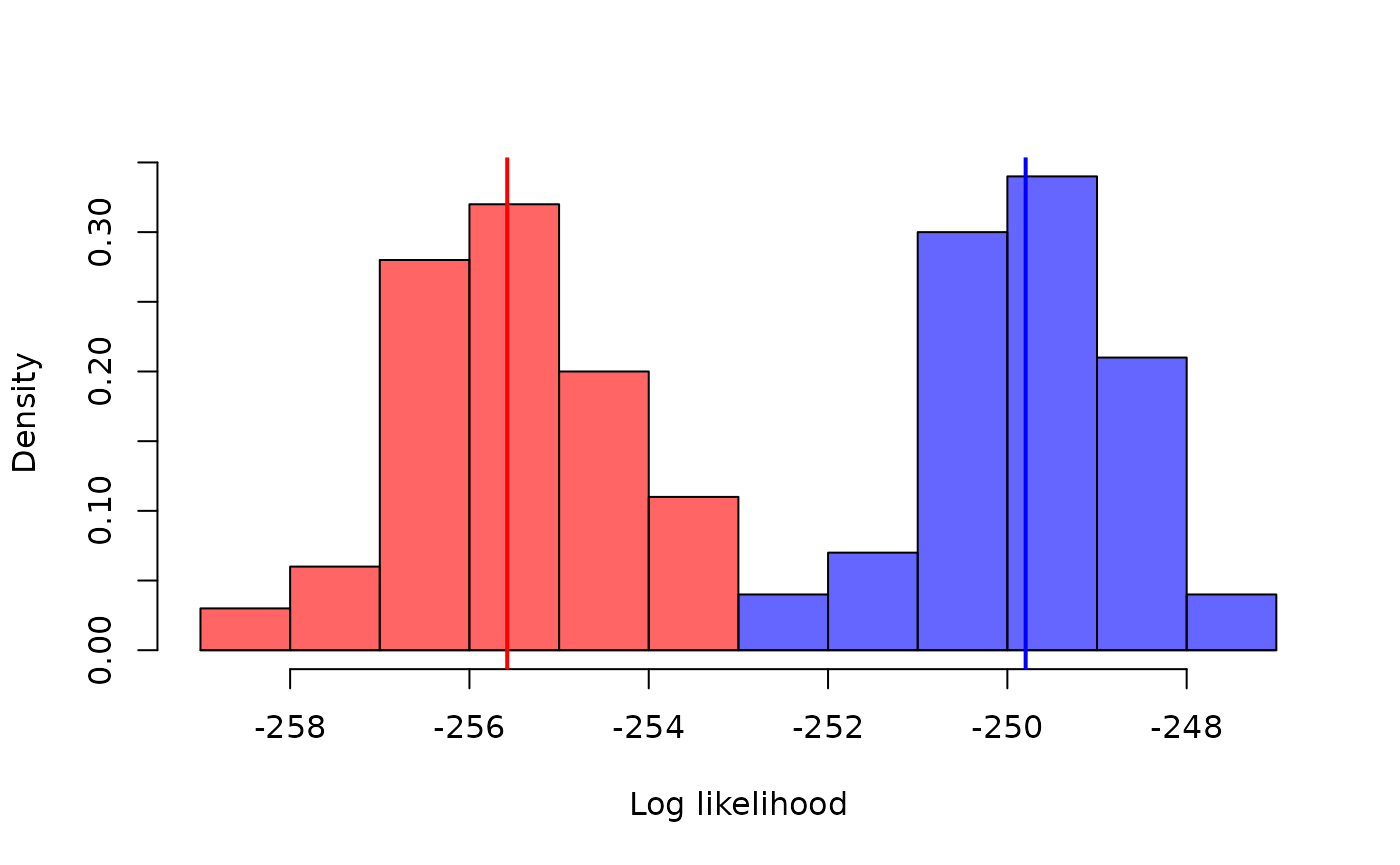
So even a relatively small difference in a parameter leads to a difference in the log-likelihood that is easily detectable in only 100 runs of the filter, even when the distributions overlap. However, it does make optimisation-based approaches to inference, such as maximum likelihood, tricky because it’s hard to know which way “up” is if each time you try a point it might return a different height.
If you run a particle filter with the argument
save_trajectories = TRUE then we save the trajectories of
particles over time:
dust_likelihood_run(filter, list(beta = 0.2, gamma = 0.1),
save_trajectories = TRUE)
#> [1] -245.1714You can access these with
dust_likelihood_last_trajectories():
h <- dust_likelihood_last_trajectories(filter)The result here is a 4 x 100 x 200 array:
dim(h)
#> [1] 4 200 100The dimensions represent, in turn:
- 4 state variables
- 200 particles
- 100 time steps (corresponding to the data)
Considering just incidence, and plotting over time, you may be able to make out the tree structure of the trajectories, with fewer distinct traces at the start of the time series, and some traces more heavily represented in the final sample than others:
incidence <- dust_unpack_state(sys, h)$incidence
matplot(t(incidence), type = "l", lty = 1, col = "#00000022")
points(cases ~ time, data, pch = 19, col = "red")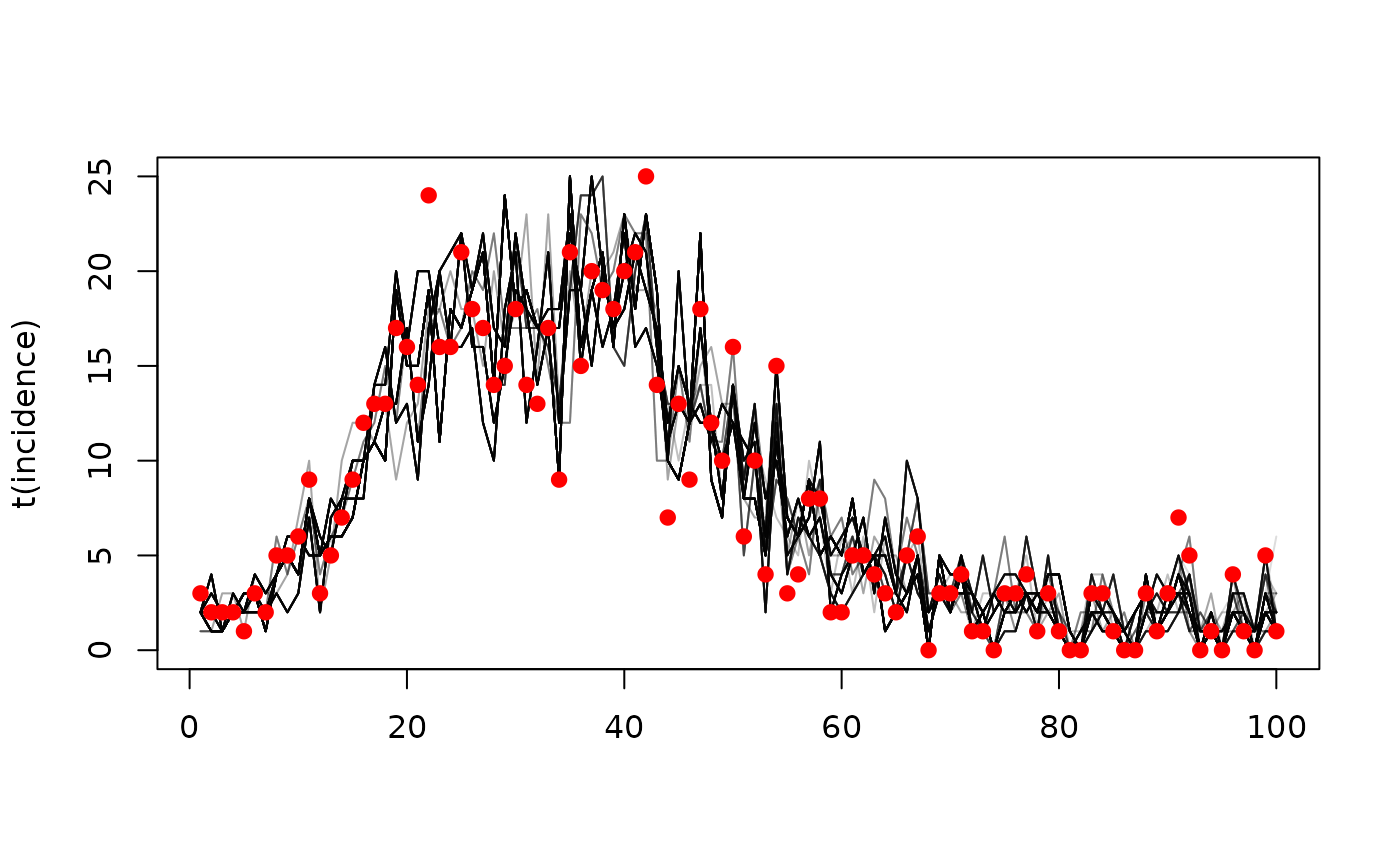
Inference with particle MCMC (pMCMC)
We can use MCMC to explore this model, but to do this we will need a prior. We’ll use monty’s DSL to create one; this looks similar to the odin code above:
prior <- monty_dsl({
beta ~ Exponential(mean = 0.3)
gamma ~ Exponential(mean = 0.1)
})Here we define a prior that covers beta and
gamma, two of the three input parameters to our odin model.
This prior is a monty_model object, which we can use to
sample from, compute log densities with (to compute the prior), etc.
We also need to adapt our dust2 filter object above for
use with monty. All we need to do here is to describe how a
vector of statistical parameters (here beta and
gamma) will be converted into the inputs that the
sir system needs to run (here a list with elements
beta, gamma and I0). We do this
with a monty_packer object:
sir_packer <- monty_packer(c("beta", "gamma"), fixed = list(I0 = 5))With this packer we can convert from a list of
name-value pairs suitable for initialising a dust2 system
into a vector of parameters suitable for use with
monty:
sir_packer$pack(pars)
#> [1] 0.3 0.1and we can carry out the inverse:
sir_packer$unpack(c(0.3, 0.1))
#> $beta
#> [1] 0.3
#>
#> $gamma
#> [1] 0.1
#>
#> $I0
#> [1] 5Combining the filter and packer we create a monty model,
which we’ll call likelihood, as that’s what it
represents:
likelihood <- dust_likelihood_monty(filter, sir_packer)This likelihood is now also a monty_model object:
likelihood
#>
#> ── <monty_model> ───────────────────────────────────────────────────────────────
#> ℹ Model has 2 parameters: 'beta' and 'gamma'
#> ℹ This model:
#> • is stochastic
#> ℹ See `?monty_model()` for more informationThe monty package provides a high-level interface for
working with these objects. For example, to compute the likelihood we
could now use monty_model_density():
monty_model_density(likelihood, c(0.2, 0.1))
#> [1] -246.2969The difference to using dust_likelihood_run here is now
we provide a parameter vector from our statistical model,
rather than the inputs to the odin/dust model. This conforms to the
interface that monty uses and lets us run things like
MCMC.
We can combine the prior and the likelihood to create a posterior:
posterior <- prior + likelihoodThe last ingredient required for running an MCMC is a sampler. We don’t have much choice with a model where the likelihood is stochastic, we’ll need to run a simple random walk. However, for this we still need a proposal matrix (the variance covariance matrix that is the parameter for a multivariate Gaussian - we’ll draw new positions from this). In an ideal world, this distribution will have a similar shape to the target distribution (the posterior) as this will help with mixing. To get started, we’ll use an uncorrelated random walk with each parameter having a fairly wide variance of 0.02
sampler <- monty_sampler_random_walk(diag(2) * 0.02)We can now run an MCMC for 100 samples
samples <- monty_sample(posterior, sampler, 100,
initial = sir_packer$pack(pars))
#> ⡀⠀ Sampling ■ | 1% ETA: 2s
#> ✔ Sampled 100 steps across 1 chain in 424ms
#> We need to develop nice tools for working with the outputs of the sampler, but for now bear with some grubby base R manipulation.
The likelihood here is very “sticky”
plot(samples$density, type = "l")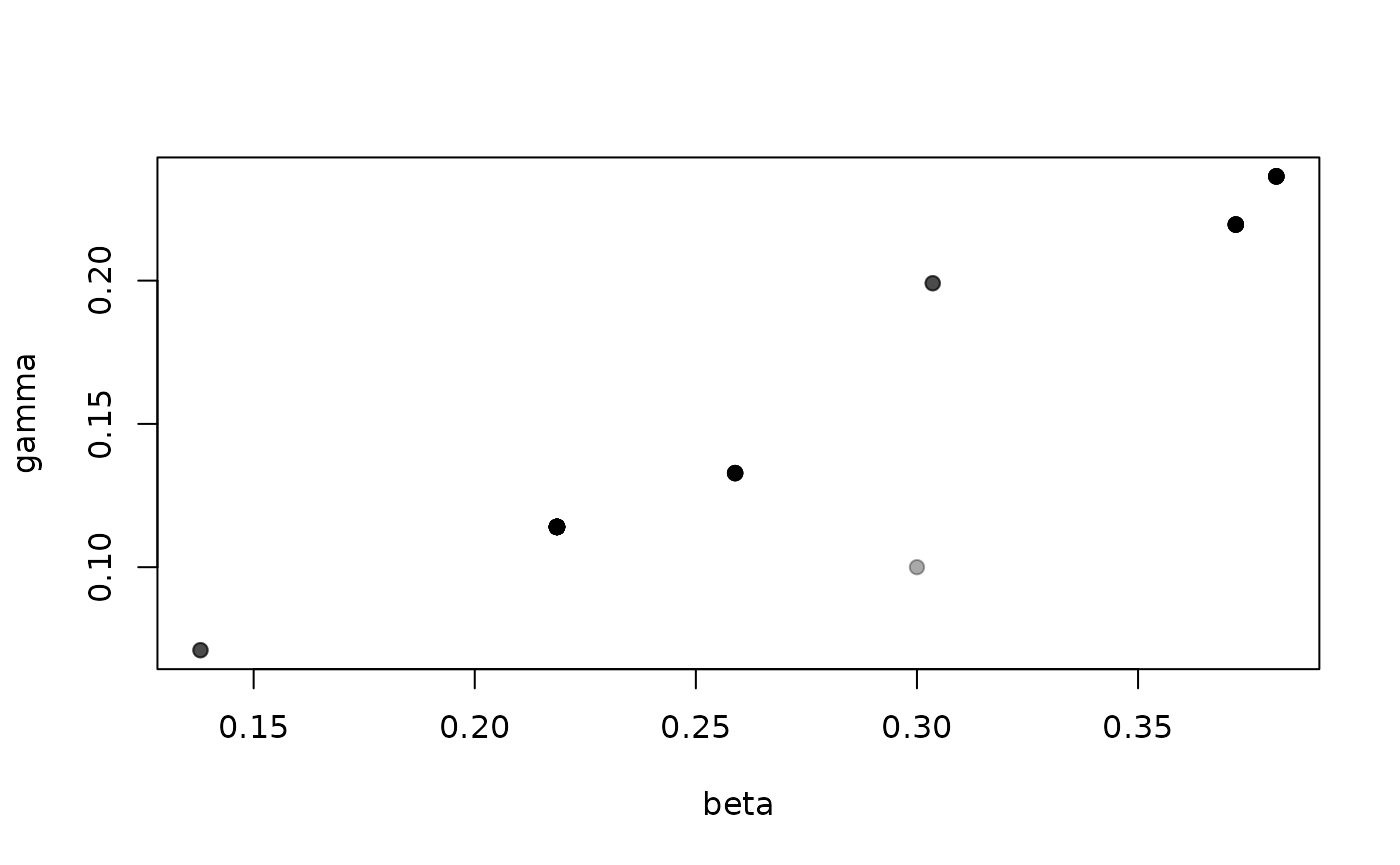
It’s hard to say a great deal about the parameters beta
(per-contact transmission rate) and gamma (recovery rate)
from this few samples, especially as we have very few effective
samples:
Effective sampling
There are several things we can do here to improve how this chain mixes
- We can try and find a better proposal kernel.
- We can increase the number of particles used in the filter. This will reduce the variance in the estimate of the marginal likelihood, which means that the random walk will be less confused by fluctuations in the surface it’s moving over. This comes at a computational cost though.
- We can increase the number of threads (effectively CPU cores) that we are using while computing the likelihood. This will scale fairly efficiently through to at least 10 cores, with the likelihood calculations being almost embarrassingly parallel. This will help to offset some of the costs incurred above.
- We can run multiple chains at once. We don’t yet have a good
parallel runner implemented in
montybut it is coming soon. This will reduce wall time (because each chain runs at the same time) and also allows us to compute convergence diagnostics which will reveal how well (or badly) we are doing. - We can try a deterministic model (see below) to get a sense of the general region of high probability space.
Here, we apply most of these suggestions at once, using a variance-covariance matrix that I prepared earlier:
filter <- dust_unfilter_create(sir(), 0, data, n_particles = 1000)
likelihood <- dust_likelihood_monty(filter, sir_packer)
vcv <- matrix(c(0.0005, 0.0003, 0.0003, 0.0003), 2, 2)
sampler <- monty_sampler_random_walk(vcv)
samples <- monty_sample(posterior, sampler, 1000,
initial = sir_packer$pack(pars))
#> ⡀⠀ Sampling ■■■■ | 8% ETA: 4s
#> ⠄⠀ Sampling ■■■■■■■■■■■■■■■■■■■■■■■■ | 77% ETA: 1s
#> ✔ Sampled 1000 steps across 1 chain in 4.4s
#> The likelihood now quickly rises up to a stable range and is clearly mixing:
plot(samples$density, type = "l")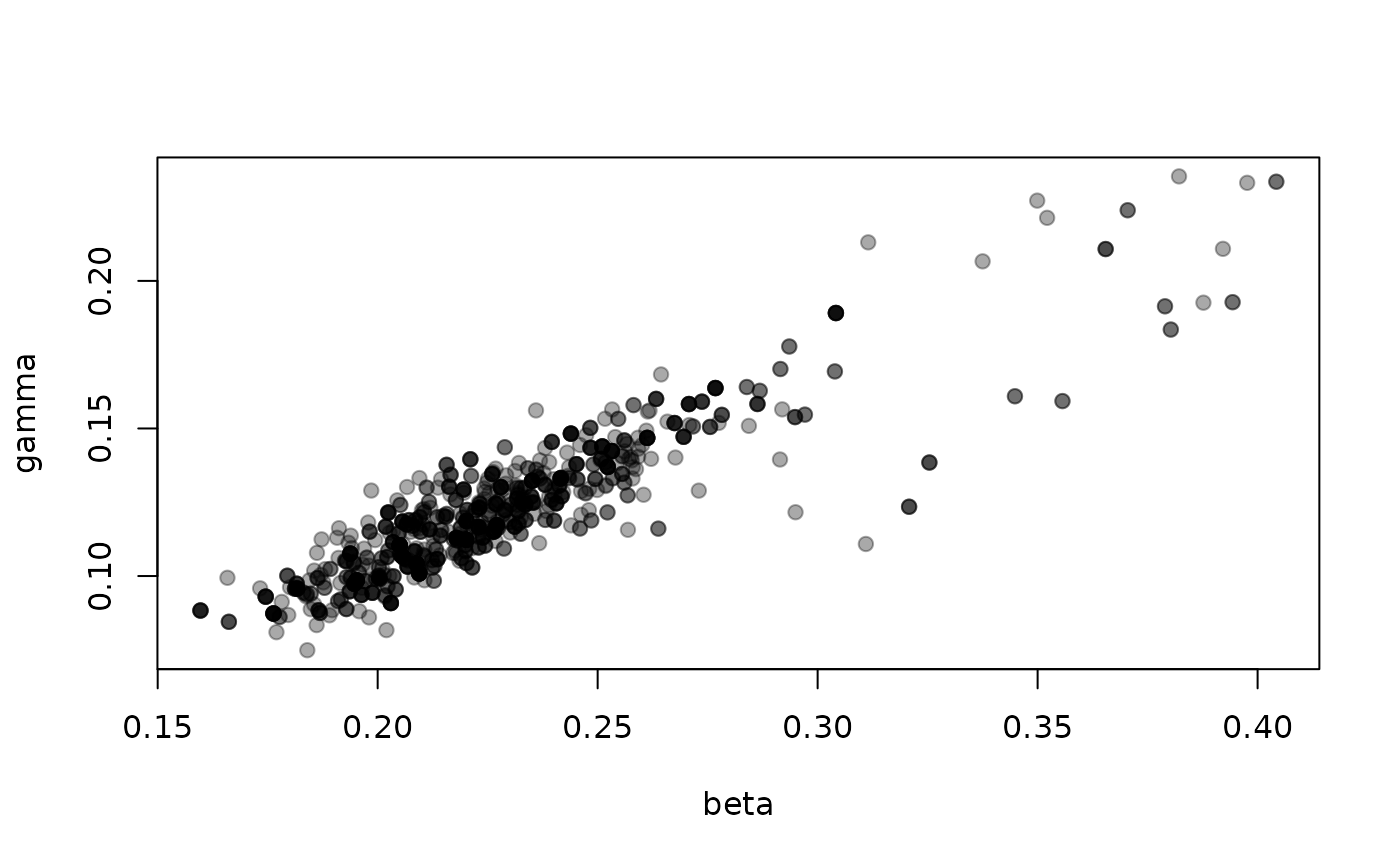
The parameters beta (per-contact transmission rate) and
gamma (recovery rate) are strongly correlated
Comparing against vectors of data
Above, we were comparing against a single point of data (per interval), but in some cases you will have vectors or higher-dimensional objects of data. This might be the case if you were fitting to age-disaggregated data. In this case you might write something like
where the syntax generalises our approach to handling arrays for the rest of the odin code:
-
casesis still defined as coming as data - We add a
dim()equation to say thatcaseshasn_ageelements - The actual comparison is now processed element-wise over all age
groups, with observed cases per age group being compared to the
corresponding modelled
incidencevalue.
Missing data will be handled elementwise, so this calculation is applied to every age group that has data.
Passing this data into the system is a bit awkward as we no longer
have a nice time-by-datastream variable. The way we support this is by
“list columns”, which you may have seen in tidyverse packages (for
example tidyr::nest
and its
vignette).
Normally, you might make a time-by-incidence data.frame
by writing:
data.frame(time = c(1, 2, 3, 4), incidence = c(0, 4, 6, 10))
#> time incidence
#> 1 1 0
#> 2 2 4
#> 3 3 6
#> 4 4 10to make a list-column for incidence we pass in a list with
the same number of elements as they are rows, and with the same number
of elements per list element as there are age groups. We then
have to wrap this with I(), for example:
Deterministic models from stochastic
Another way of fitting this model is to simply throw away the stochasticity. In the model above we have the lines
n_SI <- Binomial(S, p_SI)
n_IR <- Binomial(I, p_IR)which are the stochastic portion of the model. Each time step we
compute the number of individuals who make the transition from
S to I and from I to
R by sampling from the binomial distribution. We can
replace these calls by their expectations (so effectively making
n_SI = S * p_SI) by running the model in “deterministic”
mode.
This simplification of the stochastic model can be seen as taking expectations of the underlying random process, but there’s no reason to expect that this represents the mean of the whole model (, at least generally).
We have found these simplifications useful:
- They are not stochastic, so you can use adaptive MCMC or other more efficient algorithms
- They are orders of magnitude faster, because instead of running 100s or thousands of particles per likelihood evaluation you just run one
- The region of high probability density of the deterministic model is often within the (broader) region of high probability density of the stochastic model, so you can use these models to create reasonable starting parameter values for your chains
- The signs and relative magnitudes of the covariances among parameters are often similar between the deterministic and stochastic model, so you can use the deterministic model to estimate a variance-covariance matrix for your stochastic model – though you will need to increase all quantities in it
Obviously, this approximation comes with costs though:
- You no longer have integer valued quantities from the expectations of samples in your discrete distributions, so you have to think about fractional individuals
- The model can no longer account for stochastic effects, e.g., at low population sizes. This can make the model overly rigid, and it may poorly account for observed patterns
- The fixed
dtapproach is a first order Euler solver which offers few stability guarantees, and this will differ from a system of ODEs solved with a better ODE solver
To create a deterministic “filter” (currently, and temporarily called
an “unfilter”), use dust_unfilter_create() in place of
dust_filter_create. This will replace all calls to
stochastic functions with their expectations at the point of call.
unfilter <- dust_unfilter_create(sir(), 0, data)In contrast with filter, above, multiple calls to
unfilter with the same parameter set yield the same
result.
dust_likelihood_run(unfilter, pars)
#> [1] -543.8531
dust_likelihood_run(unfilter, pars)
#> [1] -543.8531We can now proceed as before, reusing our packer,
prior and sampler objects, which are still
useable here:
likelihood_det <- dust_likelihood_monty(unfilter, sir_packer)
posterior_det <- prior + likelihood_det
samples_det <- monty_sample(posterior_det, sampler, 1000,
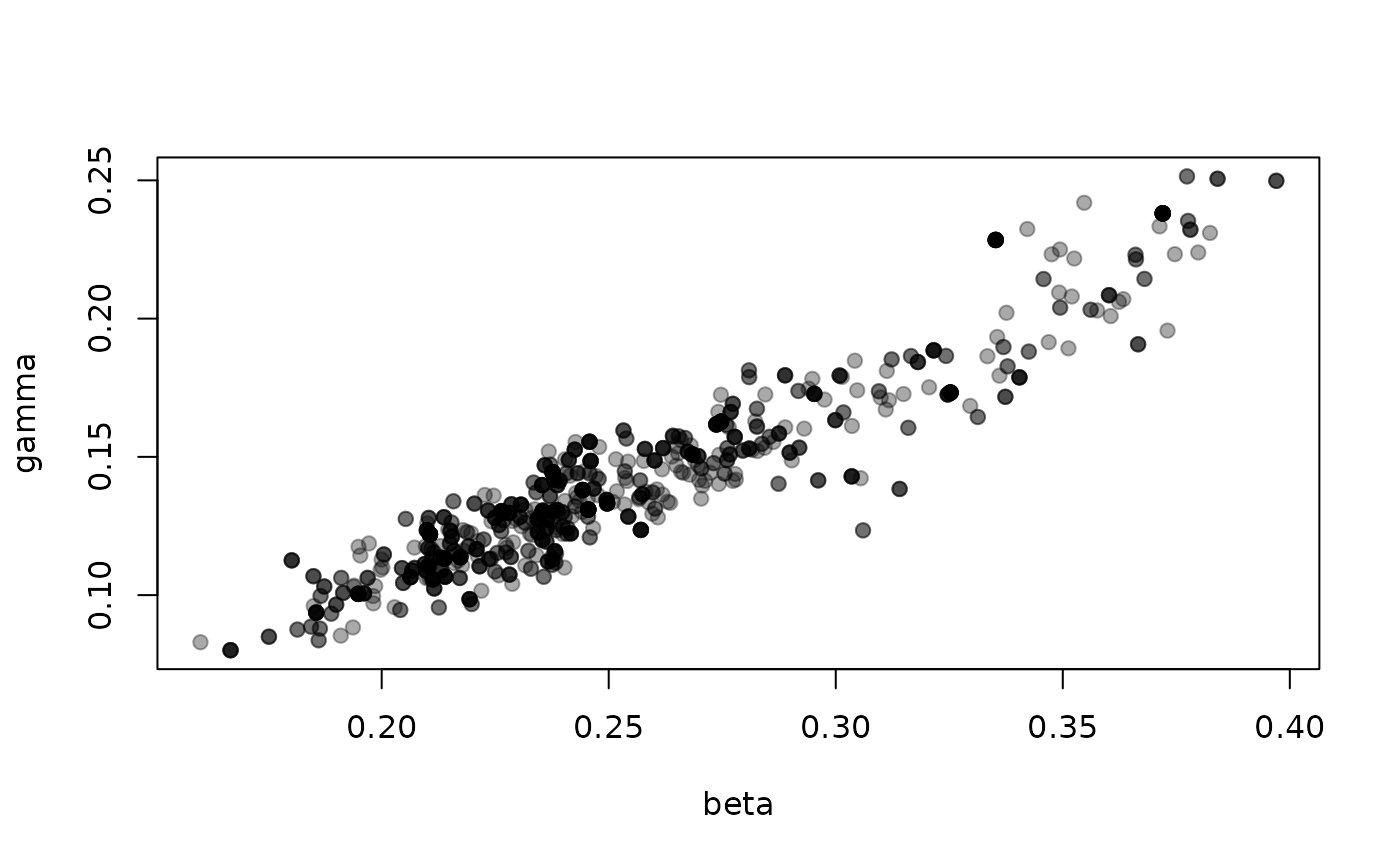
initial = sir_packer$pack(pars))Here, you can see the 1000 samples from the deterministic model (in blue) overlaid on top of the samples from the stochastic model (in grey):
plot(t(drop(samples$pars)), pch = 19, col = "#00000033")
points(t(drop(samples_det$pars)), pch = 19, col = "#0000ff33")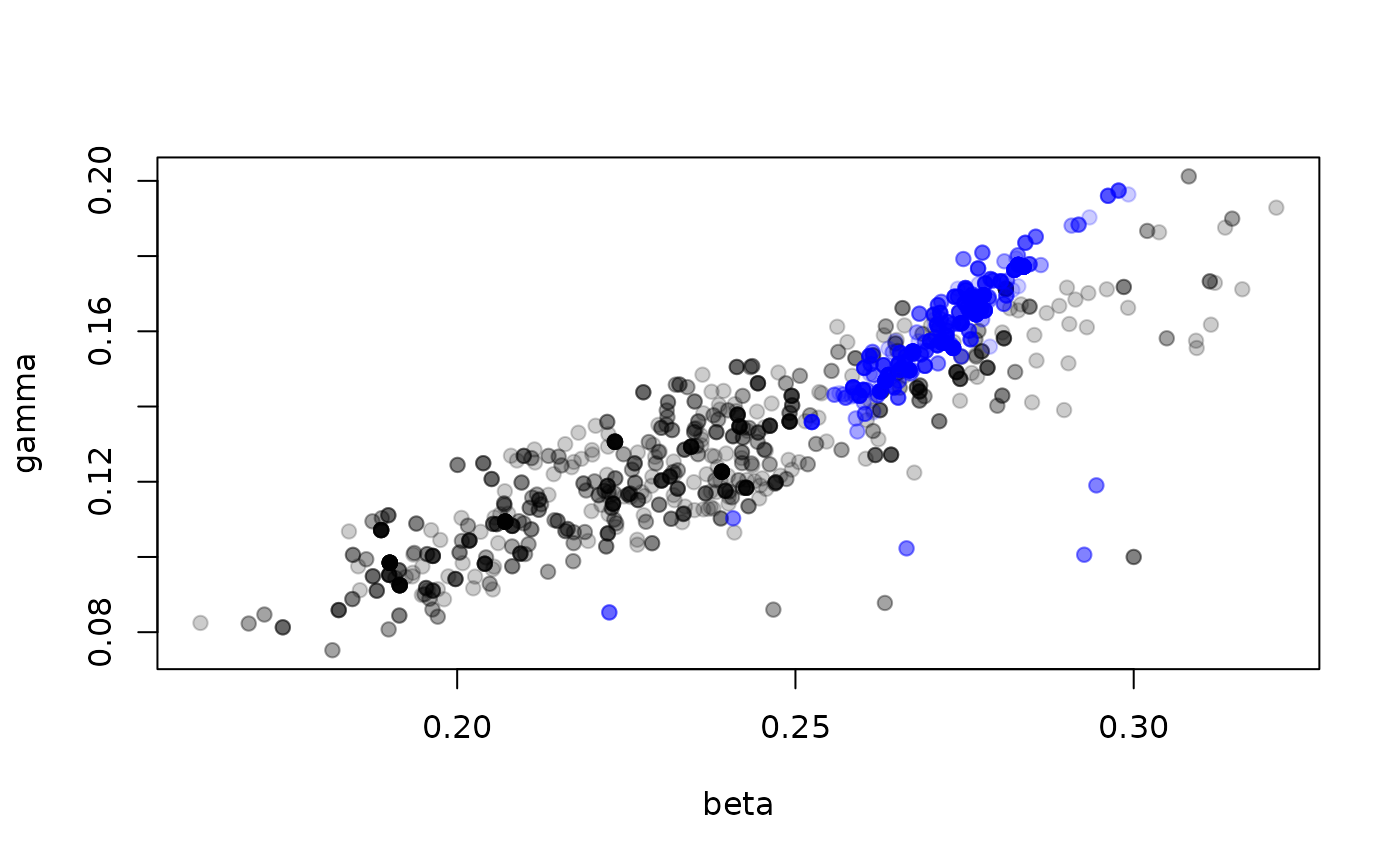
The estimated parameters here look overall shifted higher in the deterministic model, and the correlation between the parameters stronger. However, if we had no idea about what “good” parameters might be, this can get us into the approximately right location.
Differentiable models
We can go a step further than simply turning off stochasticity to create a deterministic model; now that we’ve got a deterministic likelihood function we can also differentiate that likelihood with respect to (some of) the parameters.
sir <- odin2::odin({
initial(S) <- N - I0
initial(I) <- I0
initial(R) <- 0
initial(incidence, zero_every = 1) <- 0
update(S) <- S - n_SI
update(I) <- I + n_SI - n_IR
update(R) <- R + n_IR
update(incidence) <- incidence + n_SI
n_SI <- Binomial(S, p_SI)
n_IR <- Binomial(I, p_IR)
p_SI <- 1 - exp(-beta * I / N * dt)
p_IR <- 1 - exp(-gamma * dt)
beta <- parameter(differentiate = TRUE)
gamma <- parameter(differentiate = TRUE)
I0 <- parameter()
N <- 1000
# Comparison to data
cases <- data()
cases ~ Poisson(incidence)
}, quiet = TRUE)This the same model as above, except for the definition of
beta and gamma, which now contain the argument
derivative = TRUE.
This system can be used as a stochastic model (created via
dust_filter_create) just as before. The only difference is
where the model is created using
dust_unfilter_create().
unfilter <- dust_unfilter_create(sir(), 0, data)When you run the unfilter, you can now provide the argument
adjoint = TRUE which will enable use of
dust_likelihood_last_gradient() (we may make this the
default in future).
dust_likelihood_run(unfilter, pars, adjoint = TRUE)
#> [1] -543.8531
dust_likelihood_last_gradient(unfilter)
#> [1] -6187.984 4780.146We can create a monty model with this, as before:
likelihood <- dust_likelihood_monty(unfilter, sir_packer)
likelihood
#>
#> ── <monty_model> ───────────────────────────────────────────────────────────────
#> ℹ Model has 2 parameters: 'beta' and 'gamma'
#> ℹ This model:
#> • can compute gradients
#> ℹ See `?monty_model()` for more informationand this model advertises that it can compute gradients now!
So from monty we can use
monty_model_density() and
monty_model_gradient() to compute log-likelihoods and
gradients.
monty_model_density(likelihood, c(0.2, 0.1))
#> [1] -375.0398
monty_model_gradient(likelihood, c(0.2, 0.1))
#> [1] 5093.697 -2890.574Because the prior contained gradient information, a posterior created with this version of the model also has gradients:
posterior <- likelihood + prior
posterior
#>
#> ── <monty_model> ───────────────────────────────────────────────────────────────
#> ℹ Model has 2 parameters: 'beta' and 'gamma'
#> ℹ This model:
#> • can compute gradients
#> • can be directly sampled from
#> ℹ See `?monty_model()` for more informationWith a model configured this way, you can use the Hamiltonian
Monte Carlo method with monty_sampler_hmc(), which can
be far more efficient than a random walk once tuned.
WARNING: Using derivative = TRUE on
some parameters has the effect of making the rest use
constant = TRUE. We will describe the effects of this in a
vignette on differentiable models, soon.
Running multiple parameter sets at once
You can efficiently run multiple parameter sets at once; this will be parallelised where possible when enabled. There are two cases where this might be useful:
- to support things like parallel tempering where we use the same system, the same data and multiple parameter sets to compute the likelihood of multiple parameter sets simultaneously
- to compute likelihoods across multiple “groups” in combination, where we have the same system, different data and multiple parameter sets.
For dust2 systems
When initialising the dust system, you should:
- pass a (typically unnamed) list of parameters, each element of which is a different set of parameters for the system
- pass the
n_groupsargument indicating how many groups you wish to initialise
Here is a simple case with two parameter sets that differ in
beta, each run with 20 particles:
pars2 <- list(list(beta = 0.3, gamma = 0.1, I0 = 5),
list(beta = 0.2, gamma = 0.1, I0 = 5))
sys <- dust_system_create(sir(), pars2, n_particles = 20, n_groups = 2,
dt = 0.25)
dust_system_set_state_initial(sys)
time <- 0:100
y <- dust_system_simulate(sys, time)The dimensions of y is now
dim(y)
#> [1] 4 20 2 101representing
- 4 state variables
- 20 particles
- 2 parameter groups
- 101 times
Consider just incidence as above:
matplot(time, t(y[4, , 1, ]), type = "l", lty = 1, col = "#ff000055",
xlab = "Time (days)", ylab = "Cases", las = 1)
matlines(time, t(y[4, , 2, ]), type = "l", lty = 1, col = "#0000ff55")
points(cases ~ time, data, pch = 19)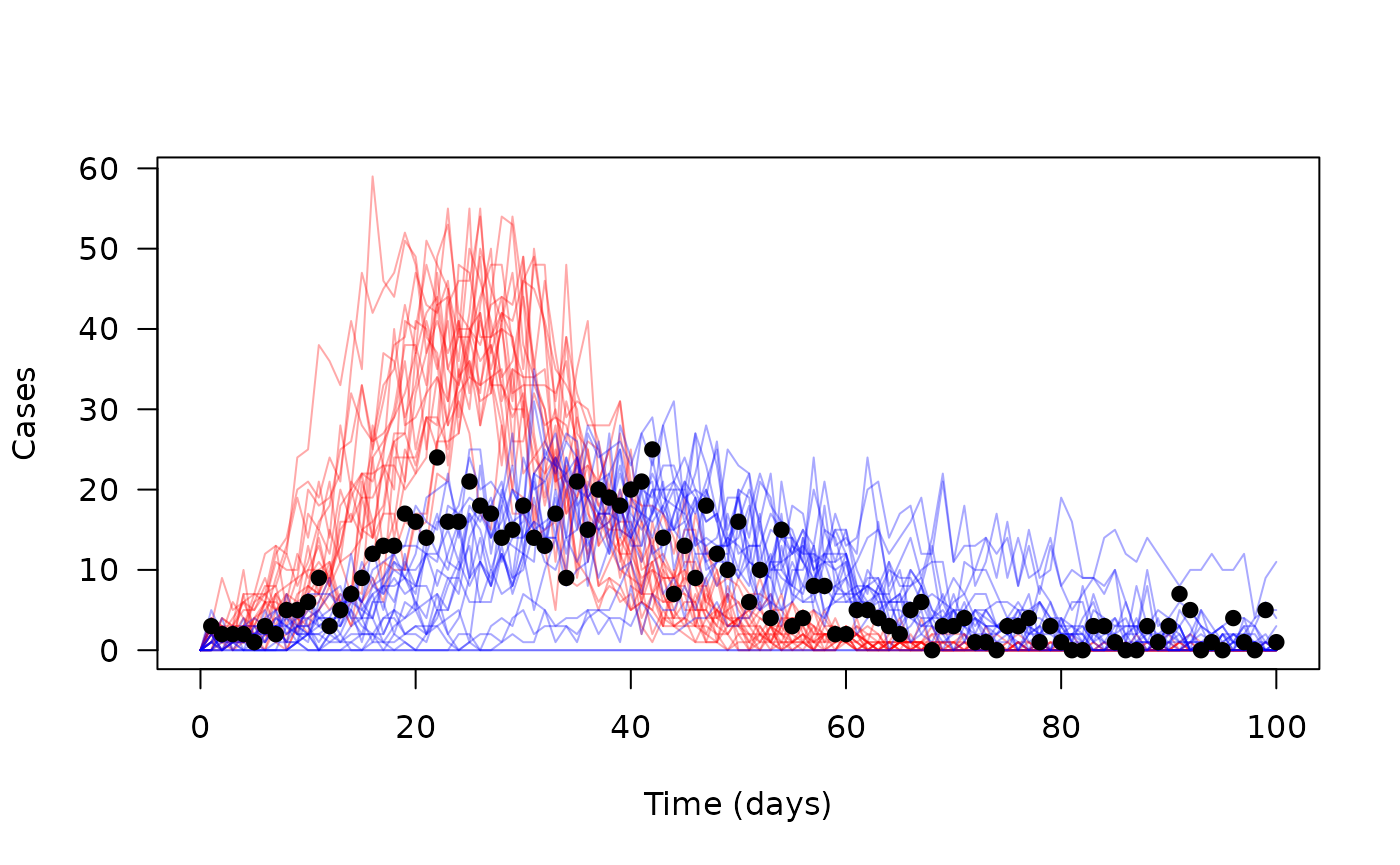
For dust2 filters/unfilters
Here we assume (require, really) that each parameter set is
associated with a different data set. We may relax this in future, but
this is the typical use case we have seen. We need an additional column
called group in addition to time:
head(data2)
#> group cases time
#> 1 1 3 1
#> 2 2 8 1
#> 3 1 2 2
#> 4 2 4 2
#> 5 1 2 3
#> 6 2 3 3(this is just synthetic data for now, created by duplicating and perturbing the original data).
plot(cases ~ time, data2, subset = group == 2, pch = 19, col = "red",
xlab = "Time (days)", ylab = "Cases")
points(cases ~ time, data2, subset = group == 1, pch = 19, col = "blue")Because the data is grouped, we don’t need to tell
dust_filter_create() that we have two groups, though you
can pass n_groups = 2 here if you want, which will validate
that you really do have exactly two groups in the data:
filter2 <- dust_filter_create(sir(), 0, data2, n_particles = 200)When passing parameters into the filter, you now should mirror the
format used in dust_system_run(); a list of lists:
dust_likelihood_run(filter2, pars2)
#> [1] -276.3184 -370.0171We now have two likelihoods returned by the filter; one per group.
For the deterministic unfilter the process is the same:
unfilter2 <- dust_unfilter_create(sir(), 0, data2)
dust_likelihood_run(unfilter2, pars2)
#> [1] -543.8531 -609.5479however, our gradient has picked up a dimension:
dust_likelihood_last_gradient(unfilter2)
#> [,1] [,2]
#> [1,] -6187.984 9175.668
#> [2,] 4780.146 -6740.108Here, the first column is the gradient of the first
parameter set, and the first row is the gradient of
beta over parameter sets.
Compare with the single parameter case:
dust_likelihood_run(unfilter, pars2[[1]])
#> [1] -543.8531
dust_likelihood_last_gradient(unfilter)
#> [1] -6187.984 4780.146For monty models
The only supported mode here is the combined likelihood case, which
requires slightly more set up. To match the monty interface, we name our
groups; we now have data for groups a and
b:
data2$group <- letters[data2$group]
head(data2)
#> group cases time
#> 1 a 3 1
#> 2 b 8 1
#> 3 a 2 2
#> 4 b 4 2
#> 5 a 2 3
#> 6 b 3 3
filter2 <- dust_filter_create(sir(), 0, data2, n_particles = 200)Here, you would use a monty_packer_grouped object rather
than a packer, to represent grouped structure. Here, we create a packer
for our two groups for the two parameters (beta and
gamma), indicating that gamma is shared
between groups and using a fixed I0 of 5 across both
groups:
packer2 <- monty_packer_grouped(groups = c("a", "b"),
scalar = c("beta", "gamma"),
shared = "gamma",
fixed = list(I0 = 5))
packer2
#>
#> ── <monty_packer_grouped> ──────────────────────────────────────────────────────
#> ℹ Packing 3 values: 'gamma', 'beta<a>', and 'beta<b>'
#> ℹ Packing 2 groups: 'a' and 'b'
#> ℹ Use '$pack()' to convert from a list to a vector
#> ℹ Use '$unpack()' to convert from a vector to a list
#> ℹ See `?monty_packer_grouped()` for more informationA suitable starting point for this packer might be
p <- c(0.1, 0.2, 0.25)
packer2$unpack(p)
#> $a
#> $a$beta
#> [1] 0.2
#>
#> $a$gamma
#> [1] 0.1
#>
#> $a$I0
#> [1] 5
#>
#>
#> $b
#> $b$beta
#> [1] 0.25
#>
#> $b$gamma
#> [1] 0.1
#>
#> $b$I0
#> [1] 5Now, we can build the likelihood:
likelihood2 <- dust_likelihood_monty(filter2, packer2)
monty_model_density(likelihood2, p)
#> [1] -611.4109